
宇宙におけるカナダといえば、「カナダアーム」
2008年にスペースシャトルで宇宙に打ち上げられたCSA:カナダ宇宙庁の多用途ロボットアーム、それが「Dexter」だ。
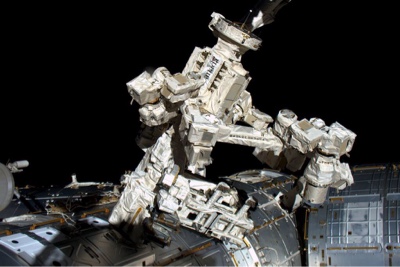
このロボットには腕が2本あり、この腕を自在に操ることでHTV「こうのとり」をキャッチしたりと様々な用途に使われている。代表的な使用(想定)例として、以下が挙げられる。
- 設置交換作業:外部カメラやISSで使用されるバッテリーなど小型機器の設置交換
- ISS保守:保守が必要となったISSの電気システム対応など
- テスト:新しい機器やロボティクス技術をテスト

ISSに装備されているカナダアーム2やISS上を移動するのに使用されるモビールベースシステムとの組み合わせにより、デクスターはISSのあらゆる箇所にて運用可能となっている。
カナダアームの歴史について
カナダアームといえば、元々はスペースシャトルに搭載されていたロボットアーム(Shuttle Remote Manipulator System、SRMS)の事を指す。躯体にデカデカと「Canada」と書かれていたため、メディアでの露出で記憶に残っている方も多いだろう。1981年のSTS-2から使用されており、その歴史は非常に長い。
そして2001年のSTS-100にて「カナダアーム2」(Space Station Remote Manipulator System, SSRMS)が打ち上げられ、ISS側にもカナダアームが装備される事となった。
そして2008年のSTS-123にて「デクスター」がISSに運ばれ、軌道上で組み立てが行われた。
進化する見た目通りの高性能システム
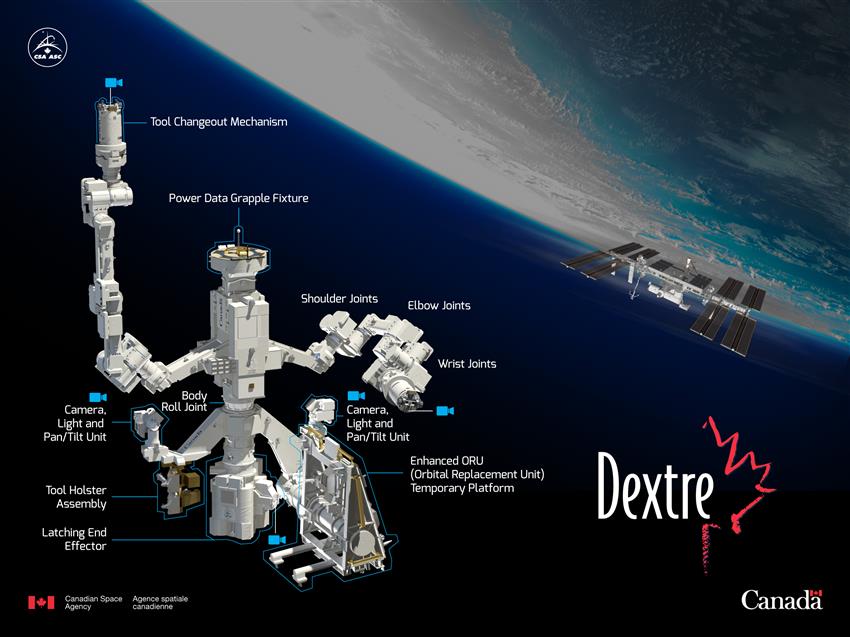
見た目からして非常に複雑そうな機械だが、実際様々な作業を実施できるように工夫が凝らされている。
それぞれのアームには7つの関節が搭載され、それぞれ上下左右回転が可能。さらにアームには電動レンチや各種カメラ類、コネクタ等が満載されており、人間の代わりに船外活動を問題なく遂行できるように設計されている。さらに、ISSの冷却システムで使用されるアンモニアが漏れた場合も感知できるセンサーなども搭載。
また2024年にはDOC(Dextre-Operated Camera)が装備され、デブリなどによってISSが受けた損傷の早期発見、検査等が行えるようになりISSの長寿命化に貢献するとされている。

▲中央にある四角い自動販売機のようなものがDOC。かなり巨大。
DOCではさらに、ISSの微小な変化を検出するため3Dマッピングレーザーを使用してISSの3Dマップを作成したり、OSIRIS-RExで使用されたのと同じレーダー技術を用いて宇宙船のドッキング関係に使用されるとのこと。
デクスター自体、そもそもNASAやCSAの地上職員が基本的に運用しているものだが、DOCにより今後ISSにの飛行士がEVAを行う回数を減らし、一層人的リスクを低減させるのに一役買いそうだ。
また、高解像度のカメラで撮影された各種映像はISSから飛行士が撮影する映像とはまた違ったものとなり、新しい宇宙のイメージを作り出してくれそうだ。


コメント